





-
プロジェクト概要
- 本プロジェクトは、Chartが開発を進める水中探査ロボット「ヒレロボット」の水中自律移動の実現に向けた取り組みです。
ヒレロボットは、水中・陸上・災害現場・宇宙など、過酷で複雑な環境を自在に移動できることを目指した多用途モビリティであり、特に水中では養殖支援や水産資源調査などへの応用が期待されています。
これまでにプロトタイプは完成しており、現在はその成果を踏まえて、水中環境における自律的な移動や制御の実現に向けた開発フェーズへと移行しています。
本クラウドファンディングでは、水中での自律移動を実現するためのプロトタイプ開発、実証試験、ソフトウェア開発といった工程を進めるためのご支援を募集しています。
未来の現場で実際に使えるロボットを目指して、ぜひ皆さまのお力をお貸しいただければ幸いです。 -
ヒレロボットについて
-
- 本ロボットは「ヒレ」による独自の推進機構を備え、水中・陸上などでの活躍を想定しています。
-
水中での推進性能
- 柔軟なヒレの波打つ動きによって、水中でも安定した推進力を発生させることが可能です。
スクリューのような回転機構を使わず、流体の中を滑らかに進むため、濁流・浮遊物・障害物が存在する水中環境でも推進力が失われにくく、かつ障害物との接触による故障リスクが低減されます。 -
多様な地形適応性能
- 「ヒレ」を波打たせる独自の推進機構により、氷上・砂地・泥濘地・瓦礫上・配管内部など、従来の車輪・クローラ型では困難な環境下でも安定して移動できます。
特に、地形が急激に変化する災害現場などでは、臨機応変にその場の環境に適応して走行を継続できます。
また、水中から陸上へのスムーズな連続移動も実現します。 -
内蔵バッテリー駆動で高い機動自由度
- 内蔵バッテリーによる完全独立電源により、ケーブルを引きずる必要がなく、入り組んだ空間や障害物の多い現場でも自在に動き回れます。
配線に絡まる心配がないため、複雑な配管・瓦礫下での安定した遠隔操作が可能です。 -
「ヒレロボット」の活用イメージ
-
-
水中資源探査・調査での活用
- ・水中資源マッピングの効率化
水中資源の位置情報のマッピングを低予算、高精度で探査。
・ダム・堤体内部調査
通常アクセス困難な貯水池内部・水中構造物・排水ゲート部点検に活用。 -
被災地での瓦礫下状況の確認・生存者探索・安全確認
- ・災害現場初動の状況把握
地震・爆発事故・津波などで倒壊・浸水した現場に即座に投入。瓦礫の隙間や浸水エリアに入り込み、人が踏み込む前の安全確認や二次災害リスク(崩落・ガス漏れなど)の評価。
・瓦礫内部の生存者探索
狭隘部へ進入できる小型性を活かし、生存空間の有無や声・動き・体温等のセンサ搭載による生存者検出補助。
・二次災害予防の遠隔確認
余震後の不安定な建物内部・危険物質流出現場に対し、救助隊の投入前に先行調査役として利用。 -
高放射線・高温等、極限環境での遠隔計測
- ・原子力施設の廃炉現場点検
燃料デブリ調査・高線量エリア内の視認・表面温度分布計測。
・火山火口縁の状況観測
高温・有毒火山ガスエリア周縁部での地質活動モニタリング。 -
宇宙探査用途(未知環境適応型ローバー)
- ・エウロパ・エンケラドスなど氷下海洋探査
氷・水・岩場が混在する極限環境下での地質・生命痕跡探査用途へ応用。
・火星地下空洞・溶岩管探査
狭い場所で、水分・粉塵が存在する地下空洞探査ミッションに活用。
・月面基地周辺の安全確認
足を取られやすい、柔らかいレゴリス堆積地などでの自立探査。 -
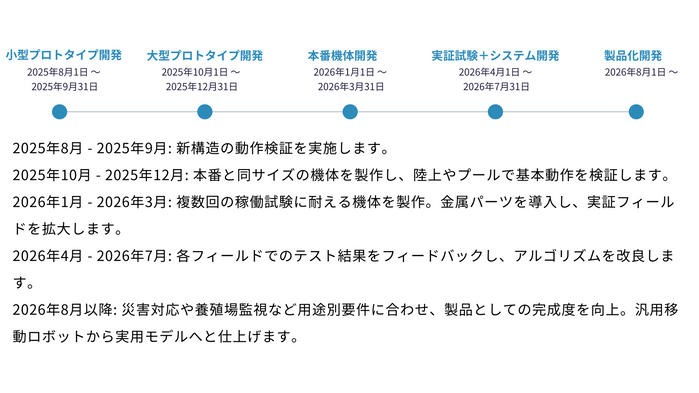
開発スケジュール
-
- ※進捗や状況により、開発スケジュールは変更になる可能性があります。
-
返礼品について
- Chartの「ヒレロボット」プロジェクトにご支援いただいた皆さまへ、感謝の気持ちを込めて、さまざまな返礼品をご用意しました。
-
お礼メッセージ
- 開発メンバーからの感謝の気持ちを込めた、特別なお礼メッセージをお届けします。応援してくださる皆さまとのつながりを大切に、心を込めてお伝えします。
-
プロジェクト報告書
- 現在開発中のプロトタイプから、来年度春頃に完成予定の本番機体までの開発状況を、実証試験の記録や多様なフィールドでの検証結果とともに、時系列でまとめた報告書です。プロジェクトの進展を追体験いただける内容となっています。
-
ヒレロボット実験動画
- 開発現場の熱量をそのままに、水中・陸上での実験の様子や開発の裏側を収めた特別動画をお届けします。
-
おもちゃ版ヒレロボット
- 手のひらサイズで楽しめる、おもちゃ版ヒレロボットをご用意します。実機をベースにしたデザインで、身近にヒレロボットの世界を感じていただけるアイテムです。
-
ヒレロボット操作体験&交流会
- 実際にヒレロボットを操作できる、特別な体験をご用意します。 開発中のロボットを使って、水中や陸上での動作を現地で操作いただけます(実施方法は調整中です)。 エンジニアと直接話せる時間も設け、技術の裏側や開発ストーリーにも触れていただける内容を予定しています。
-
Acknowledgements(謝辞)
- お名前を、本プロジェクトに関する論文の「Acknowledgements(謝辞)」欄に掲載させていただきます。 私たちの研究・開発の歩みに共に関わってくださった証として、学術的な記録にもお名前を刻ませていただきます。
-
支援金の使い道
- 皆さまからいただいたご支援は、ヒレロボットの開発・実証・製品化に向けて、大切に活用させていただきます。未知の環境に挑むロボットを形にするため、以下のような項目に充てさせていただく予定です。
-
プロトタイプ製作費
- 小型〜本番サイズの試作機を開発するための材料費、部品費、3Dプリントや加工費に使用します。
-
実証試験に関わる費用
- 水中・陸上・災害現場模擬環境など、さまざまなフィールドでの動作検証にかかる設備費・交通費・機材レンタル費などに充てます。
-
ソフトウェア開発費
- 自己位置推定、自律移動、遠隔操作などに必要なソフトウェアの開発や調整のための費用です。
-
映像・報告制作費
- 実験の記録映像やご支援者向けの報告資料、返礼品に含まれる各種コンテンツの制作費にも一部を活用させていただきます。
-
製品化に向けた開発費
- 最終的に実用化・販売を見据えた、耐久性・安全性・用途特化型モデルの開発にもご支援を活かします。
-
その他
- ヒレロボットに関する詳細や、Chartの取り組みについては、以下のリンクからぜひご覧ください。
-
ヒレロボット プレスリリース
-
Chartについて
- 最新情報や開発の裏側なども発信しております。フォロー・ご覧いただけますと幸いです!